







Robots will soon replace the tractor
Drone-like helicopters and field robots that can automatically detect weeds are only a couple of years away, say researchers.
It sounds like technology from a science fiction movie: robots that automatically take care of a farmer’s crops. But according to Danish researchers, it won’t be long before this is a reality.
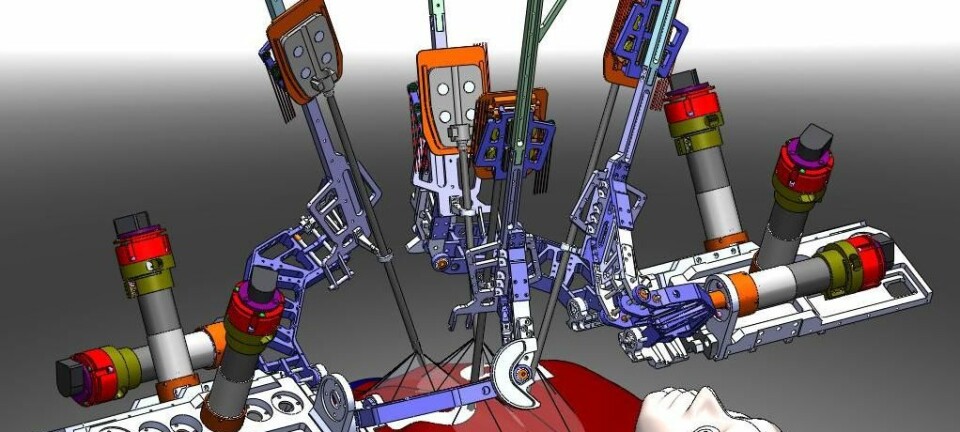
”We’re in the process of developing a fully automatic robotic system that can automatically detect weeds and spray them. The system works by means of small unmanned helicopters and small ground vehicles,” says PhD fellow Karl Damkjær Hansen, of Aalborg University’s Department of Electronic Systems Automation & Control.
“The helicopter takes aerial photographs which reveal the sections of a field that are particularly plagued by weeds. A ground vehicle then automatically drives to those sections, where it identifies the individual weeds and removes them.”
Multitasking robots
The helicopter takes aerial photographs which reveal the sections of a field that are particularly plagued by weeds. A ground vehicle then automatically drives to those sections, where it identifies the individual weeds and removes them.
The researchers behind the new system believe it can perform several task at once. In addition to removing weeds, the robots are also designed to measure the crop growth stage as well as the soil nitrate content.
All the data collected by the robots is then stored in a map of the field, so the farmer can make informed decisions about harvest time, crop rotation and the like.
Hansen’s role in the development of the robotic system is to get the robots to plan the most effective route and to co-ordinate their movements.
”It’s a great challenge to get a computer program to automatically figure out the optimal route,” he says.
We’ve come a long way in terms of training the system to recognise weeds. It works a bit like an Xbox Kinect system – but our cameras are a lot more accurate.
“It may not sound all that difficult if you have just a single robotic lawnmower. But when you have five helicopters and ten field robots and everything has to harmonise, it soon becomes incredibly complex.”
Similar to Xbox technology
While Hansen is working on optimising the robots’ movements, his colleagues are working on other parts of the system, including programming the system to distinguish weeds from crops.
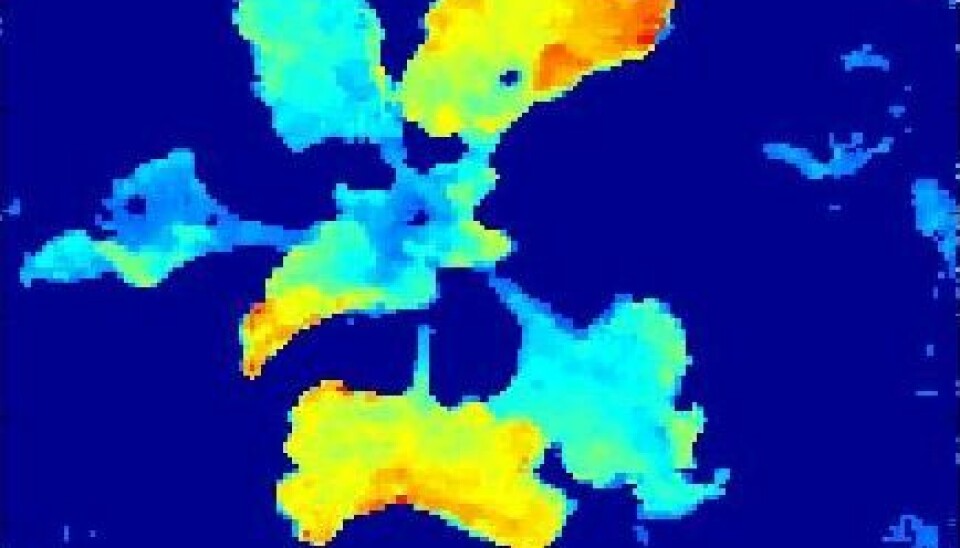
”We’ve come a long way in terms of training the system to recognise weeds. It works a bit like an Xbox Kinect system – but our cameras are a lot more accurate,” says Hansen.
Whereas the Kinect sensor is designed to recognise and distinguish people’s movements, the cameras on the robots recognise plants and can distinguish between them.
”We’re using two types of cameras. A so-called Time-of-Flight (TOF) camera, which detects the three-dimensional form of objects. This camera can capture the shape of a leaf and determine whether it’s a sugar beet or a thistle. We’re also using ‘regular’ cameras to analyse the colours of the plants and determine whether or not they are utility plants.”
Robots can calibrate themselves
The robots are usually quite adept at solving the various tasks in the lab, but when they’re let loose in the fields, they tend to struggle.
“Reality is complex,” says Hansen. ”For instance, sunlight and shadow make it hard to use colours to determine whether a plant belongs to one group or another.”
Automating the entire robotic system so that it can figure out by itself where and how much to spray is a big challenge. But the researchers are adamant that the system should be able to control and calibrate itself – even without the farmer having to know anything about the technology.
“The robotic system is designed to solve the tasks independently. The farmer should only need to press a button and the whole thing will run automatically.”
Farming drones only a few years away
So far in the development of the robotic system, the researchers have only focused on sugar beets and thistles. They are, however, planning to make a system which is capable of looking after all types of crops, for instance oats or barley. In other words, there is a lot of refinement work left to do.
”It may take ten years before you’ll be seeing complete robotic systems like ours,” says Hansen.
But certain parts of the technology will soon be seen in modern agriculture.
Farmers have already started using aerial photography to gain knowledge about crops and weeds. These photos are currently being taken from planes, which is both expensive and troublesome. But this will soon change, says the researcher:
“I believe that within the next two years we’ll be seeing drones hovering over the fields.”
----------------------------------
Read the Danish version of this article at videnskab.dk
Translated by: Dann Vinther